Kitronik Kitronik Robotics Board for Raspberry Pi Pico
- RS Stock No.:
- 224-7771
- Mfr. Part No.:
- 5329
- Manufacturer:
- Kitronik

Currently unavailable
We don't know if this item will be back in stock, RS intend to remove it from our range soon.
- RS Stock No.:
- 224-7771
- Mfr. Part No.:
- 5329
- Manufacturer:
- Kitronik
Specifications
Technical data sheets
Legislation and Compliance
Product Details
Find similar products by selecting one or more attributes.
Select all | Attribute | Value |
|---|---|---|
| Brand | Kitronik | |
| Product Name | Kitronik Robotics Board for Raspberry Pi Pico | |
| Product Type | Raspberry Pi HAT | |
| Form Factor | HAT | |
| Standards/Approvals | RoHS | |
| Select all | ||
|---|---|---|
Brand Kitronik | ||
Product Name Kitronik Robotics Board for Raspberry Pi Pico | ||
Product Type Raspberry Pi HAT | ||
Form Factor HAT | ||
Standards/Approvals RoHS | ||
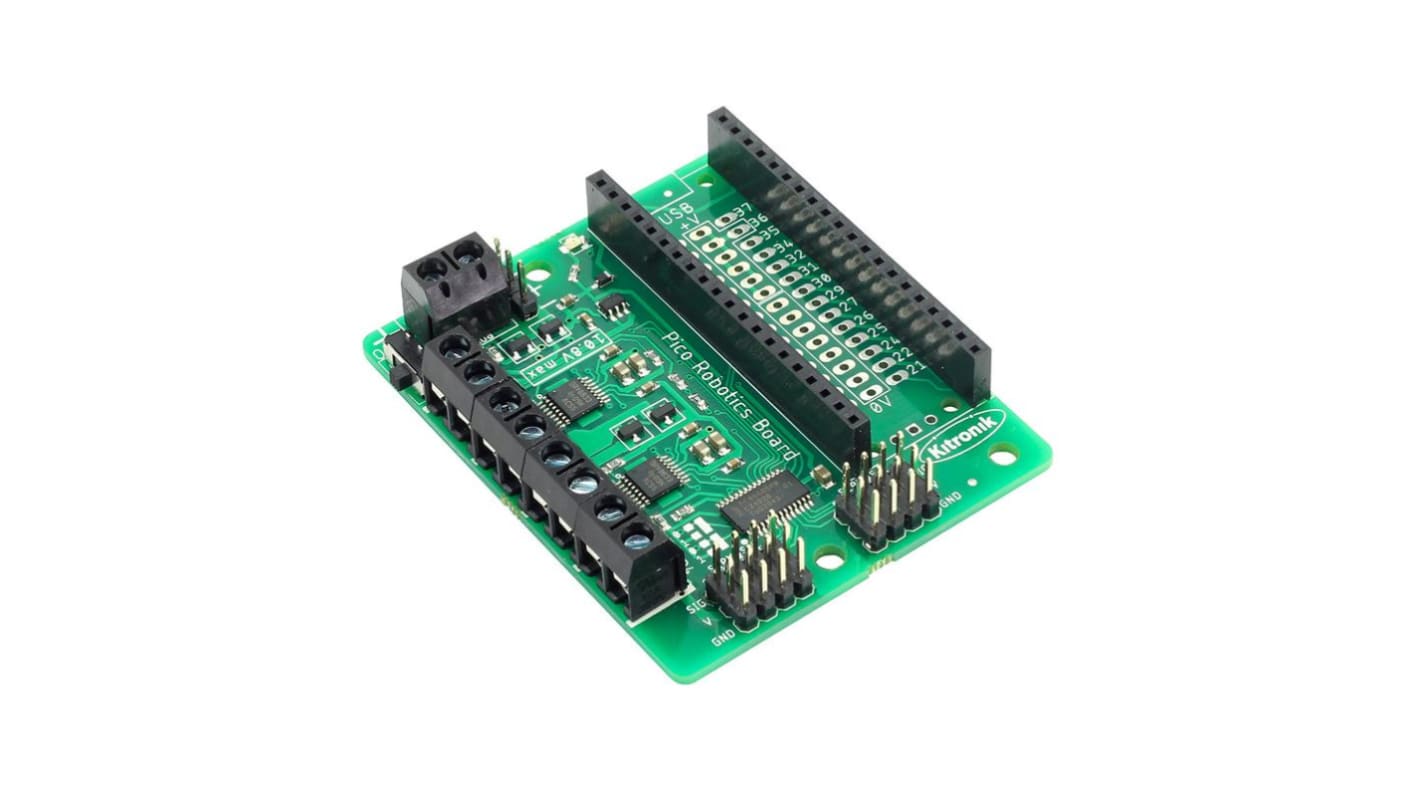
The Kitronik Kitronik Robotics Board enables the Raspberry Pi Pico (connected via pin header) to drive 4 motors (or 2 stepper motors) and 8 servos. It also features 27 other I/O expansion points and power and ground connections. The Robotics Board features 2 dual H Bridge Motor Driver ICs. These are capable of driving 2 standard motors or 1 stepper motor each, with full forward, reverse, and stop control. There are also 8 servo outputs, capable of driving standard and continuous rotation servos. They can all be controlled by the Pico using the I2C protocol, via a 16 channel driver IC. The IO break out provides connections to all the unused pins on the Pico. The 27 available I/O pins allow other devices, such as sensors or ZIP LEDs, to be added to the board. Power is provided via either a terminal block or servo style connector. The supply is then controlled by an on/off power switch to the board and there is also a green LED to indicate when the board has power.
A compact yet feature-packed board designed to sit at the heart of Raspberry Pi Pico robotics projects
The board can drive 4 motors (or 2 stepper motors), with full forward, reverse, and stop control, and 8 servos
It also features 27 other I/O expansion points and Power and Ground connections
The I2C communication lines are also broken out allowing other I2C compatible devices to be controlled
Additionally, the board features an on/off switch and power status LED
Power the board via either a terminal block or servo style connector
The 3V and GND pins are broken out to solder pads, allowing external devices to be powered
Code it with MicroPython via an editor such as the thonny editor